



Les systèmes de chauffage, de ventilation et de climatisation : des éléments clés de la transition énergétique.
Les bâtiments représentent un tiers de la consommation d’énergie dans le monde, dont la moitié est utilisée par les systèmes de chauffage, de ventilation et de climatisation (CVC). Ces systèmes sont responsables de 15 % des émissions de CO2. Il est essentiel de réguler ces systèmes de manière optimale pour conserver l’énergie et réduire l’incidence des changements climatiques.
La demande d’énergie varie tout au long de la journée, en fonction des conditions météorologiques et des habitudes de consommation. Les périodes de pointe, lorsque la demande d’énergie est la plus élevée, posent un défi particulier aux opérateurs de réseaux et coïncident souvent avec les périodes où les systèmes CVC consomment le plus d’énergie. Dans de nombreux pays, comme le Canada, les États-Unis ou la France, des mesures de gestion de la demande sont mises au point pour inciter les ménages à limiter leur consommation d’énergie, notamment pendant les périodes de pointe. Parmi celles-ci, mentionnons les programmes de réponse à la demande, qui consistent à modifier le prix de l’électricité afin d’inciter les ménages à réduire leur consommation pendant les périodes de pointe.
De toutes les charges qui peuvent être gérées pour influencer la consommation d’énergie, les systèmes CVC sont particulièrement importants en raison de leur part considérable dans la consommation totale d’énergie. En outre, l’optimisation des systèmes CVC n’a pas d’incidence directe sur le confort des occupant(e)s en raison de l’inertie thermique des bâtiments. À l’instar d’une batterie, un bâtiment peut stocker de la chaleur, ce qui permet de mettre en place des stratégies de préchauffage ou de prérefroidissement afin de réduire de manière proactive la consommation d’énergie pendant les périodes de pointe.
Pour gérer la consommation d’énergie des systèmes CVC, il est possible d’ajuster les points de consigne de la température intérieure. Afin de répondre à la demande tout en tenant compte des perturbations exogènes comme les occupant(e)s et les conditions météorologiques, un modèle de bâtiment est nécessaire. Ce modèle prédit l’incidence des changements de points de consigne sur la température intérieure et la consommation d’énergie. Ces modèles peuvent être fondés sur le plan du bâtiment, mais cette approche prend souvent beaucoup de temps et limite la mise en œuvre à grande échelle. Une autre solution consiste à élaborer des modèles à partir des données de température et de consommation d’énergie mesurées. Bien que cette approche soit plus systématique, elle nécessite souvent des données importantes pour obtenir des prévisions précises, ce qui entrave son adoption à grande échelle.
L’originalité de notre approche
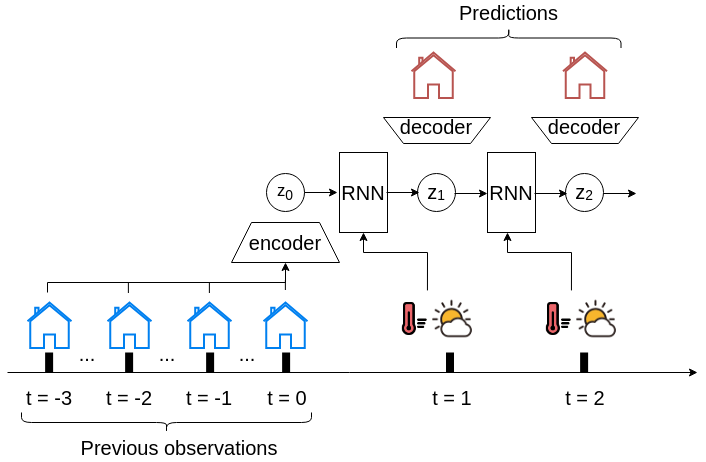
Les modèles fondés sur des données sont fréquemment utilisés pour faire des prédictions dans un cadre à temps discret, où le mode prévoit l’état du système au prochain pas de temps zt+1 en fonction de l’état actuel zt, des actions à venir et des prévisions météorologiques. Un bâtiment est un système partiellement observable, et les décalages d’observation d’état sont encodés dans un espace latent servant à faire des prédictions. Appelés « modèles d’espace d’états » (MEE), ces modèles sont mis en œuvre avec un réseau de neurones récurrents (RNR) et une structure encodeur/décodeur, comme illustré ci-dessous.
Dans notre étude, nous proposons une formulation à temps continu de la tâche prédictive et utilisons des équations différentielles ordinaires neuronales (EDON) pour modéliser la dynamique du bâtiment. Contrairement aux MEE à temps discret présentés ci-dessus, les modèles à temps continu n’apprennent pas une fonction f permettant de prédire l’état suivant à partir de l’état précédent comme : \[Z_{t+1} = f\,_0(z_t)\].
Au lieu de cela, une fonction g, souvent appelée champ vectoriel, est apprise pour représenter l’évolution continue de l’état dans le temps. Cette fonction peut être considérée comme un dérivé de l’état, décrivant les changements d’état. Pour calculer les valeurs de la situation future, il faut intégrer le champ vectoriel à partir d’un état initial : ![]()
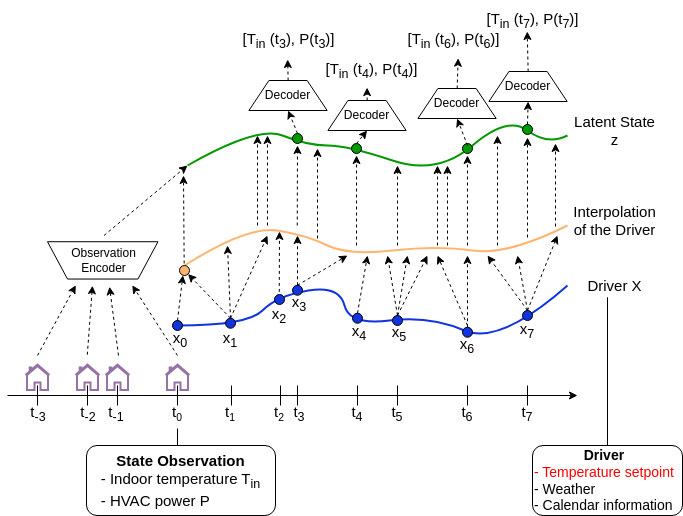
Ces modèles peuvent être considérés comme les équivalents continus des réseaux résiduels ou des RNR. Pour tenir compte des actions futures ou des prévisions météorologiques, on peut paramétrer le champ vectoriel comme suit : g(zt; xt), où xt est la valeur de l’action au moment t. Comme illustré ci-dessous, les actions et les perturbations à venir sont interpolées dans un signal continu qui sert à calculer l’évolution de l’état.
Le recours à un cadre à temps continu s’explique par le fait que le processus sous-jacent que nous essayons de modéliser, c’est-à-dire l’évolution de la température dans un bâtiment, est continu. Il est donc avantageux d’utiliser un modèle continu.
L’une des faiblesses des modèles entièrement fondés sur des données est que le modèle résultant n’est pas garanti de respecter les lois de la physique. Des modèles informés par la physique, ou structurés, ont été mis au point pour imposer des contraintes physiques aux modèles fondés sur des données. Nous proposons donc des modèles EDON encodant la loi de conservation de l’énergie pour rendre nos modèles réalistes. Ces modèles sont désignés ci-après comme des modèles « structurés ».
Enfin, l’un des avantages des modèles à temps continu est qu’ils sont mieux adaptés au traitement des données irrégulières et manquantes. Lors de la planification, la gestion des données irrégulières et manquantes est surtout pertinente dans la partie encodeur, car il est inutile de faire des prévisions irrégulières pour planifier les points de consigne de la température intérieure. Nous proposons donc des encodeurs continus (EC) pour construire des états latents plus informatifs.
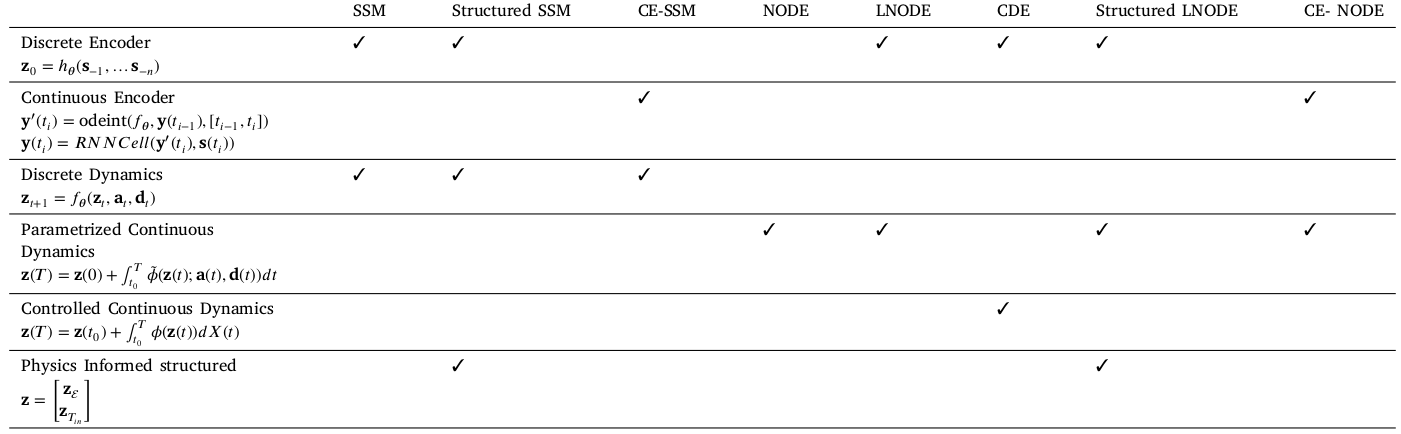
Les modèles à temps continu (EDON), y compris la structure informée par la physique et les encodeurs à temps continu et à temps discret, sont tous comparés à leurs équivalents à temps discret (les MEE). Le tableau ci-dessous donne un aperçu des modèles mis à l’essai.
Les modèles prédictifs ont pour but d’éclairer les décisions. Nous intégrons donc le modèle prédictif dans une commande prédictive. Nous formulons le problème de commande avec une contrainte stricte sur la consommation maximale d’énergie afin de prioriser les économies d’énergie au détriment du confort pendant les heures de pointe. Nous utilisons également des intervalles de température de confort au lieu de points de consigne fixes pour améliorer l’économie d’énergie tout en maintenant un niveau minimal de confort pour les occupant(e)s.
Résultats expérimentaux
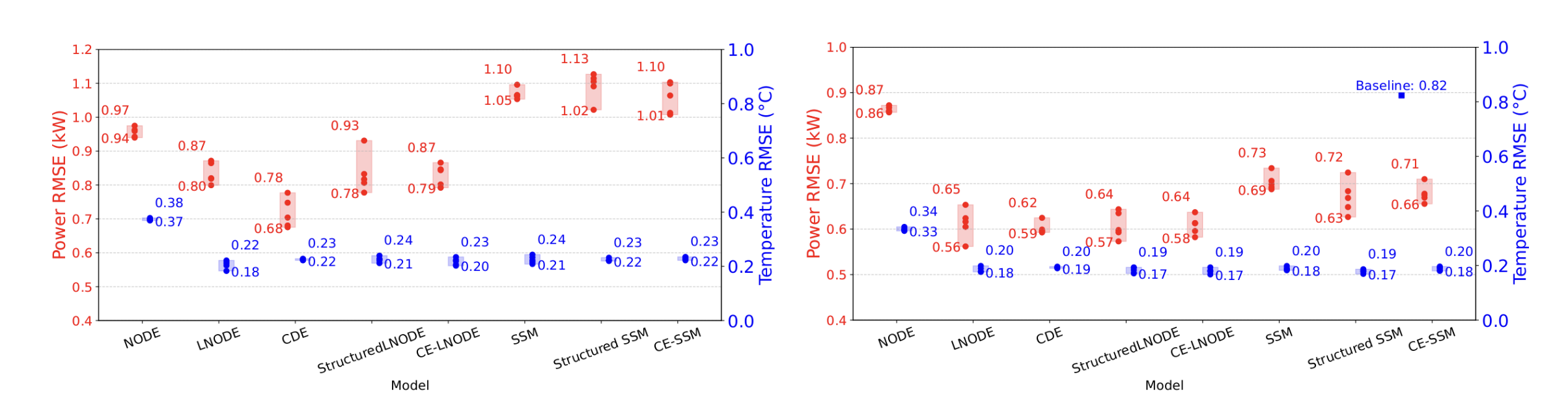
Pour évaluer les performances des modèles EDON, nous comparons tout d’abord leur précision de prédiction avec leur équivalent en temps discret sur des données simulées et du monde réel. Notre principale constatation est que les modèles à temps continu nécessitent moins de données d’entraînement que les modèles à temps discret.
Les graphiques ci-dessous montrent la racine de l’erreur quadratique moyenne (RMSE) sur les prévisions à 2h et à l’avance de la température et de la consommation d’énergie du système CVC pour une maison modélisée dans EnergyPlus. Les modèles sont entraînés avec 2,5 mois de données d’entraînement (figure de gauche) et 10 mois de données d’entraînement (figure de droite). Les cinq modèles les plus à gauche sont des modèles à temps continu, tandis que les trois modèles de droite sont des modèles à temps discret. On peut observer les meilleures performances du modèle à temps continu, en particulier lorsqu’il est entraîné avec moins de données.
En ce qui concerne la commande, les modèles à temps continu et à temps discret obtiennent des performances semblables lorsqu’ils sont utilisés avec la commande prédictive pour réduire la consommation d’énergie pendant les heures de pointe. Le graphique ci-dessous est un exemple de commande sur quatre jours à l’aide du modèle Équations différentielles ordinaires neuronales latentes (EDONL) (temps continu) pendant la période hivernale. La courbe rouge représente la consommation d’énergie du système CVC de la maison, alors que la courbe jaune correspond à la consommation d’énergie sans commande prédictive. La courbe bleue indique la consommation d’énergie prédite par le modèle, sur laquelle sont planifiées les actions de commande.
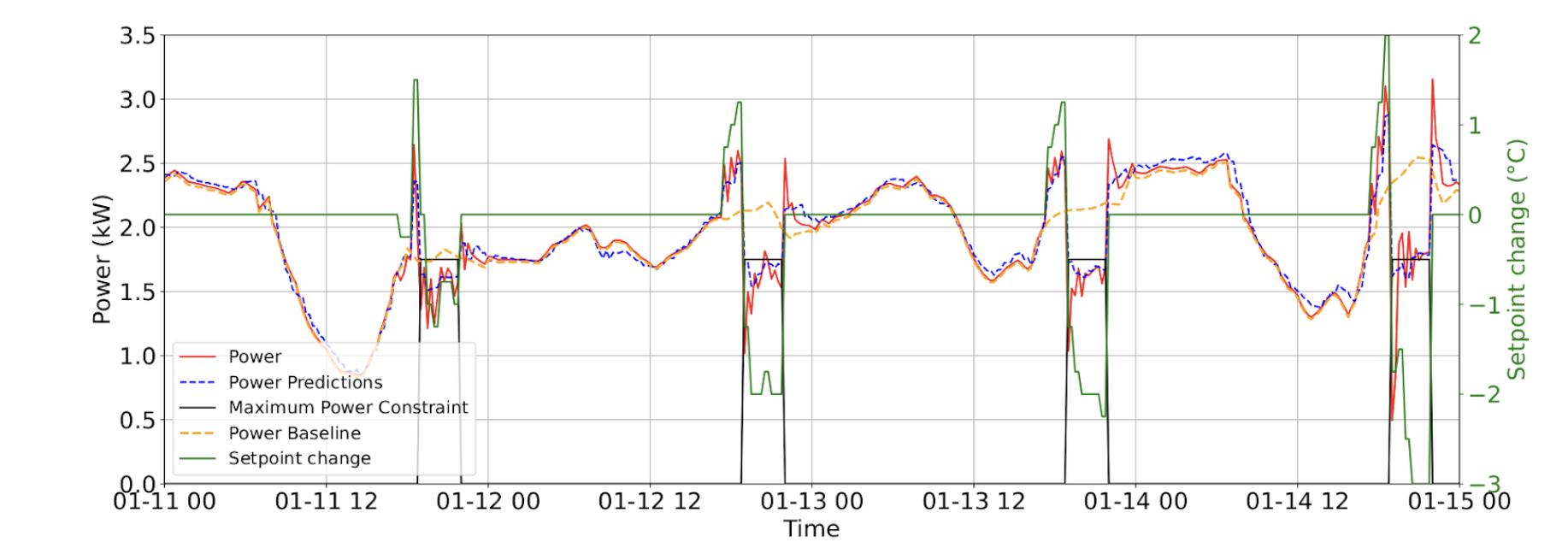
Nous observons que notre système de commande est en mesure de trouver des stratégies de préchauffage, en augmentant le point de consigne de température avant la période de pointe pour stocker la chaleur avant de diminuer la consommation d’énergie à l’heure de pointe. Nous remarquons également l’importance de la précision de la prédiction pour gérer les contraintes de puissance maximale. Par exemple, au cours du deuxième jour affiché, la consommation d’énergie prévue reste inférieure au maximum, alors que pendant un pas de temps, la consommation d’énergie réelle dépasse le maximum. Un moyen simple et efficace d’atténuer les erreurs de prédiction consiste à accorder une marge de manœuvre à la contrainte de puissance maximale.
Conclusion
Dans cette étude, nous proposons de nouveaux modèles continus fondés sur des données pour prévoir la température intérieure et la consommation d’énergie des systèmes de CVC dans les bâtiments. Nos résultats empiriques montrent que les modèles à temps continu sont plus efficaces en termes d’échantillonnage que leurs équivalents à temps discret, qui sont actuellement largement répandus dans la pratique. De plus, nous proposons un algorithme de commande prédictive pour utiliser les modèles prédictifs afin de planifier les points de consigne optimaux de la température intérieure pendant les périodes de pointe de la demande. Nos résultats montrent que les modèles à temps continu et à temps discret peuvent être employés efficacement pour planifier la réduction de la consommation d’énergie tout en préservant le confort des utilisateur(-trice)s.


