



Probabilistic Planning with Sequential Monte Carlo methods
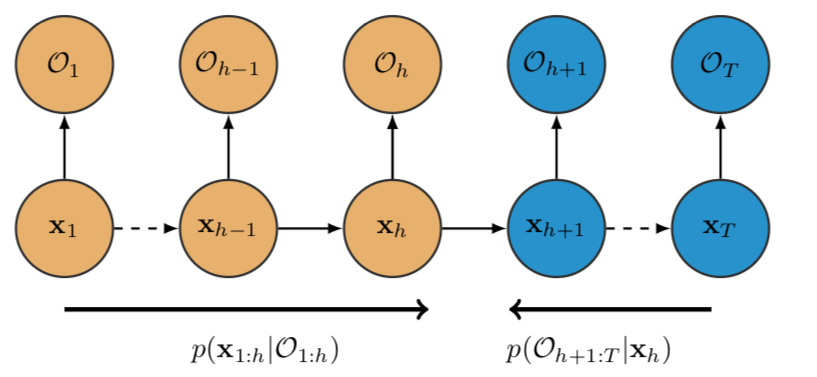
Dans ce travail, nous proposons une nouvelle formulation de planification, qui considère cette dernière comme un problème d’inférence probabiliste sur les trajectoires optimales futures. Cela nous permet d’utiliser des méthodes d’échantillonnage et, ainsi, d’aborder la planification dans des domaines continus en utilisant un budget de calcul fixe. Nous concevons un nouvel algorithme, Sequential Monte Carlo Planning, en exploitant les méthodes classiques de Monte Carlo séquentielles et de lissage bayésien dans le contexte du contrôle en inférence. De plus, nous montrons que la planification séquentielle de Monte-Carlo peut capturer des politiques multimodales et peut apprendre rapidement des tâches de contrôle continues.
Reference
https://openreview.net/forum?id=ByetGn0cYX


