



TarMAC: Targeted Multi-Agent Communication
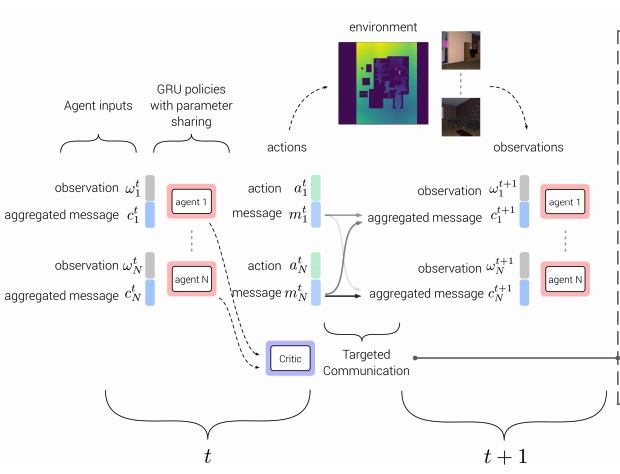
We explore a collaborative multi-agent reinforcement learning setting where a team of agents attempts to solve cooperative tasks in partially-observable environments. In this scenario, learning an effective communication protocol is key. We propose a communication architecture that allows for targeted communication, where agents learn both what messages to send and who to send them to, solely from downstream task-specific reward without any communication supervision. Additionally, we introduce a multi-stage communication approach where the agents co-ordinate via multiple rounds of communication before taking actions in the environment. We evaluate our approach on a diverse set of cooperative multi-agent tasks, of varying difficulties, with varying number of agents, in a variety of environments ranging from 2D grid layouts of shapes and simulated traffic junctions to complex 3D indoor environments. We demonstrate the benefits of targeted as well as multi-stage communication. Moreover, we show that the targeted communication strategies learned by agents are both interpretable and intuitive.

