



Prioritizing Starting States for Reinforcement Learning
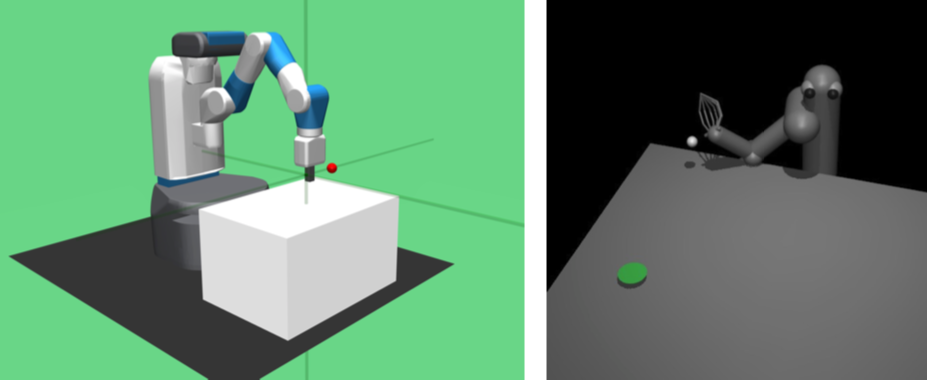
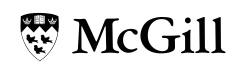
Online, off-policy reinforcement learning algorithms are able to use an experience memory to remember and replay past experiences. In prior work, this approach was used to stabilize training by breaking the temporal correlations of the updates and avoiding the rapid forgetting of possibly rare experiences. In this work, we propose a conceptually simple framework that uses an experience memory to help exploration by prioritizing the starting states from which the agent starts acting in the environment, importantly, in a fashion that is also compatible with on-policy algorithms. Given the capacity to restart the agent in states corresponding to its past observations, we achieve this objective by (i) enabling the agent to restart in states belonging to significant past experiences (e.g., nearby goals), and (ii) promoting faster coverage of the state space through starting from a more diverse set of states. While, using a good priority measure to identify significant past transitions, we expect case (i) to more considerably help exploration in certain domains (e.g., sparse reward tasks), we hypothesize that case (ii) will generally be beneficial, even without any prioritization. We show empirically that our approach improves learning performance for both off-policy and on-policy deep reinforcement learning methods, with most notable gains in highly sparse reward tasks.
Reference
https://arxiv.org/abs/1811.11298
